Sistemas supervisórios
Quando nos referimos aos sistemas supervisórios, o próprio nome já da uma ideia do que se trata. Os sistemas supervisórios são de extrema importância dentro da industria no acompanhamento da produção para melhoria dos processos.
Além disso um sistema supervisório dentro da empresa tem a função de traçar um histórico de um equipamento por meio de captura e armazenagem num banco de dados. Essas informações vêm de sensores destinados a fins específicos.
Os sistemas supervisórios mais encontrados no mercado como Elipse, ScadaBR entre outros, trazem diversas vantagens como análise de tendências, alarmes, geração de relatórios e gráficos.
Sistemas de supervisão - projeto
Visando essa ideia de acompanhamento e supervisão , a partir de agora vamos elaborar alguns projetos bem simples de supervisão com algumas ferramentas que estão ao nosso alcance.
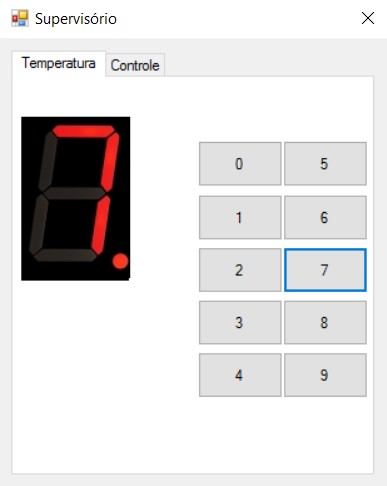
Usando o Visual Studio C# foi elaborado uma tela com os conceitos que foram passadas em diversas vídeo-aulas e uma estrutura bem elaborada baseada em linguagem C.
O aplicativo pode ser baixado por esse link onde com a ligação demonstrada abaixo é possível ver o funcionamento conforme o vídeo disponível.
O esquema de ligação:

fonte: próprio autor
Nessa ligação existe um Led que usa o mesmo endereçamento do led 13 do Arduino e dois botões, que ligam e desligam o sistema luminoso respectivamente.
Material:
1 Protoboard (matriz de contatos)
1Arduino Uno R3 ou compatível
2 push-buttons
2 resistores 10k
1 resistor 150 ohms
1 led
cabos jumpers ou fios
O código-fonte:
Segue abaixo o código fonte comentado:
/*
Projeto Arduino acendendo e apagando o led com botão e
via serial aplicativo C#
by: TonY EmersoN MariM
----------------------------------------
--=<| www.mecatronizar.blogspot.com.br |>=--
----------------------------------------
*/
//Declaração das constantes
const int led = 13;//constante led refere-se ao pino digital 13
const int botao = 2;//constante botão refere-se ao pino digital 2
const int botao2 = 3;//constante botão refere-se ao pino digital 3.
char dado; //caracteres que fazem comuicação com o C#
//Variável que conterá os estados do botão (0 low, 1 HIGH)
int estadoBotao = 0;
int estadoBotao2 = 0;
//Método setup, executado uma vez ao ligar o Arduino
void setup(){
Serial.begin (9600);
pinMode (led,OUTPUT);//Definindo pino digital 13 como de saída
pinMode (botao,INPUT);//Definindo pino digital 2 como de entrada
pinMode (botao2,INPUT);//Definindo pino digital 3 como de entrada
}
//Método loop, executado enquanto o Arduino estiver ligado
void loop(){
button://Label de retorno
//Lendo o estado do pino 2, constante botao, e atribuindo
//o resultado a variável estadoBotao
estadoBotao = digitalRead(botao);
estadoBotao2 = digitalRead(botao2);
//Verificando o estado do botão para definir se acenderá ou
//apagará o led
if (estadoBotao == HIGH){
digitalWrite (led, HIGH);//Botão 1 pressionado, acende o led
}if (estadoBotao2 == HIGH){
digitalWrite (led,LOW);//Botão 2 pressionado, apaga o led
}
//Condição para funcionamento pela comunicação serial
//no Visual Studio
if (Serial.available()){
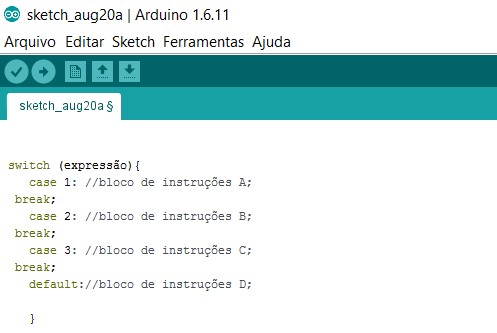
switch(Serial.read()){
case 'L'://Caso o caracter L seja atribuino no aplicativo
digitalWrite(led, HIGH);//Led acende
Serial.println("L");
delay(1000);
break;
case 'D'://Caso o caracter D seja atribuino no aplicativo
digitalWrite(led,LOW);//Led Apaga
Serial.println("D");
delay(1000);
goto button;//Executado condição, retorna a Label button
}
}
}
É possível observar que durante a execução do projeto, o aplicativo traça um histórico de funcionamento, uma integração pela porta COM e a simulação do funcionamento.
Espero que gostem, que necessitar de uma melhor explanação ou do código fonte do Visual Studio é só entrar em contato.
Para baixar o projeto completo use esse link>PROJETO.
Bons estudos!